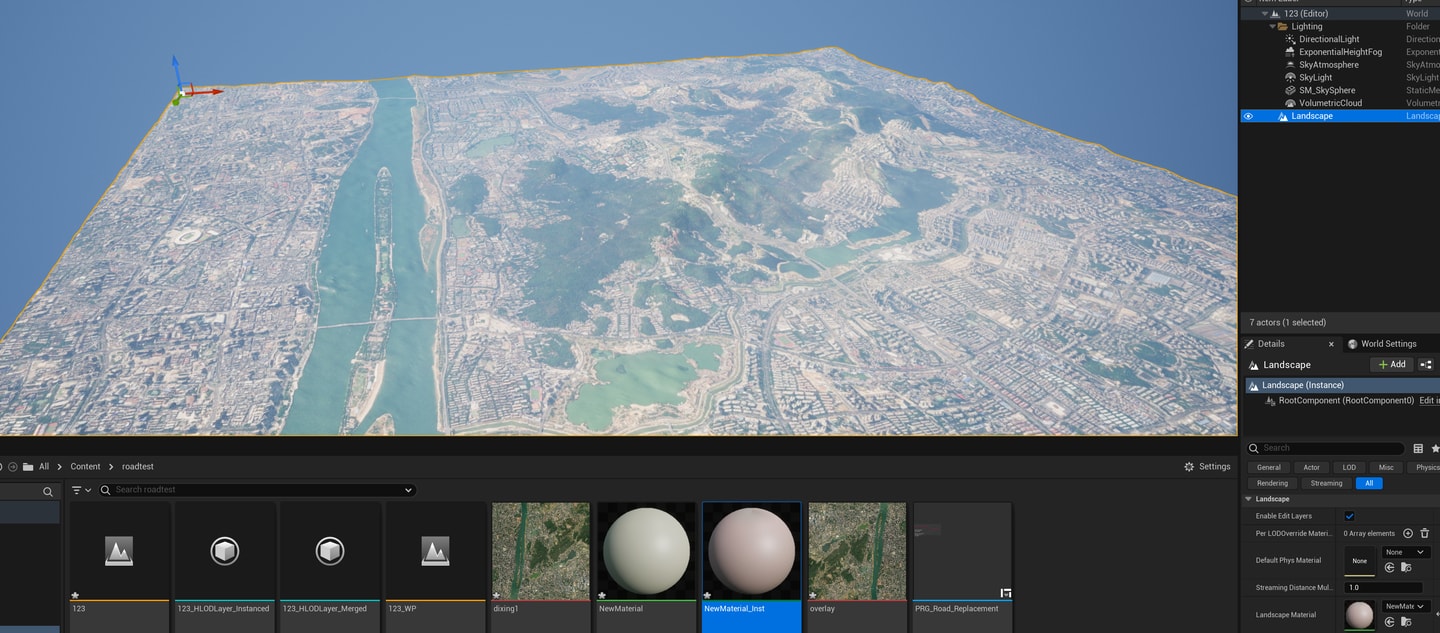
灰度图转化osm的几何体在blender、3dsmax中都不理想,最后抱着试一试的心态花了50买了基于C++的ue插件mesh to terrain converter,效果很理想,它本身不支持world partition,不过可以之后通过convert level的方式转化。
灰度图转化osm的几何体在blender、3dsmax中都不理想,最后抱着试一试的心态花了50买了基于C++的ue插件mesh to terrain converter,效果很理想,它本身不支持world partition,不过可以之后通过convert level的方式转化。
昨天晚上到今早折腾ue的osm插件,失败,这里面涉及c++文件编译,说是文件缺失那问题就大了,搞了半天下载visual studio白忙活。考虑到大马路、街区内的小路要做的真实多样,指望osm一键到位也不可能,最多是分批导入定位用,所以也别在这个上面较劲。
下面我截取了一些百度的全景照片来分析一下大马路的构成:
问题1人行道到底跟大马路还是跟街区?跟大马路的好处是坡道起伏可以用landscape deform表现出来,但是交叉口需要设法独立设计,跟街区可以解决交叉口问题但不能landscape deform。我倾向于前者,不然的话整个城市就太平了,失去了趣味。
根据PRG的系统大马路可以拆分为road mesh即道路主体由spline mesh构成无缝连续;side spline mesh与road mesh一样由spline mesh构成无缝连续可以做连续的中间绿化、连续的马路标线、电缆、两侧的人行道、路肩、路沿、两侧连续绿化带;然后是非无缝连续的物体,如长条白色马路标线、非无缝绿化带、树木、垃圾桶、车站、共享自行车、路灯、电线杆,这些用props system实现,可以通过全局的spacing设置规则间隔,以及min max transform加入不规则的位置、大小微调变化;最后是在人行道、马路上随机出现的破损、窨井盖、树叶、垃圾,用deco per socket system通过给road mesh\side spline mesh\props mesh添加socket来定义出现的位置,设置probilities定义出现概率以及min max transform加入不规则的位置、大小微调变化。
由此总结大马路需要道路主体、绿化带、人行道、路肩路沿、车道标线;各种树木、垃圾桶、车站、电线杆、自行车、电动车、路灯、车位标线;树叶decal、窨井盖decal、破损decal、垃圾decal.
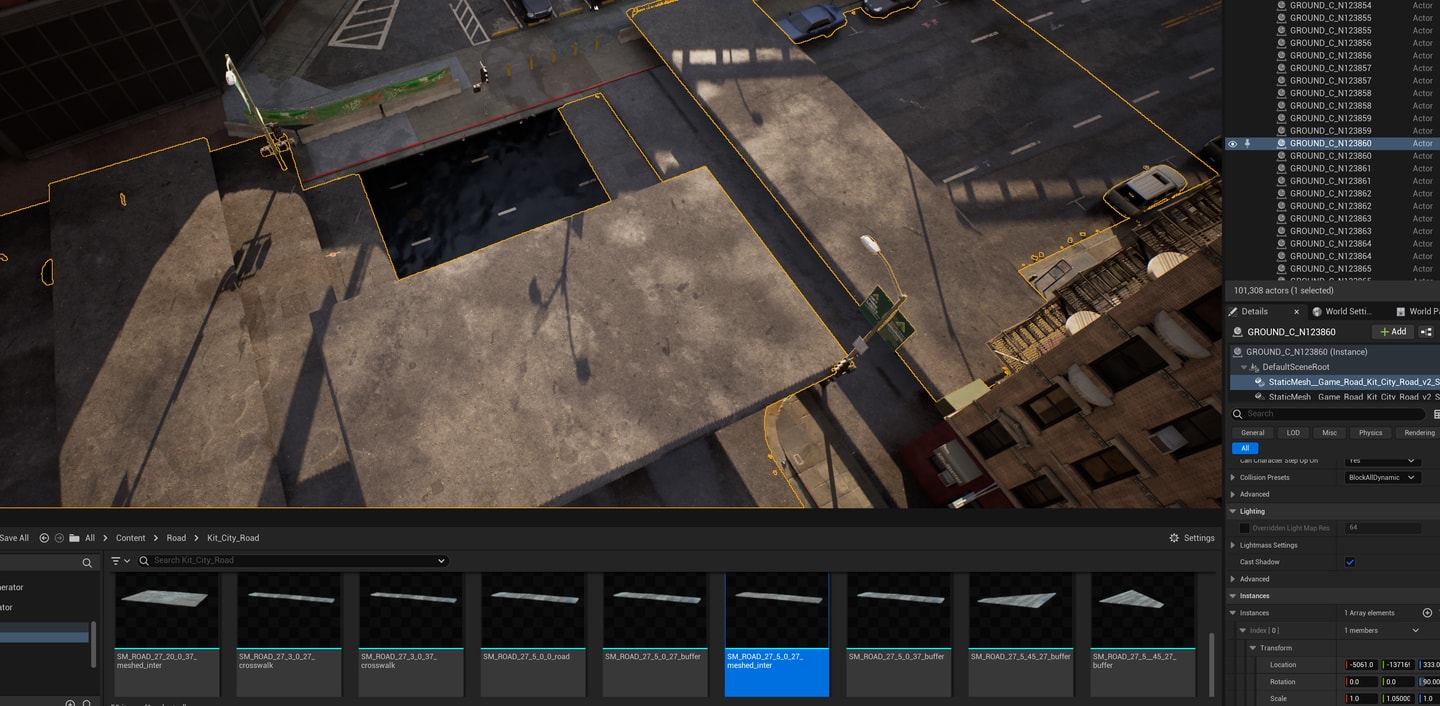
道路主体简单来看就是宽度,车道数什么的是基于道路宽度用标线划分的,现实中的道路宽度可以用百度地图测距计算。我看了下matrix中的road mesh有3个规格20米,28米,37米。

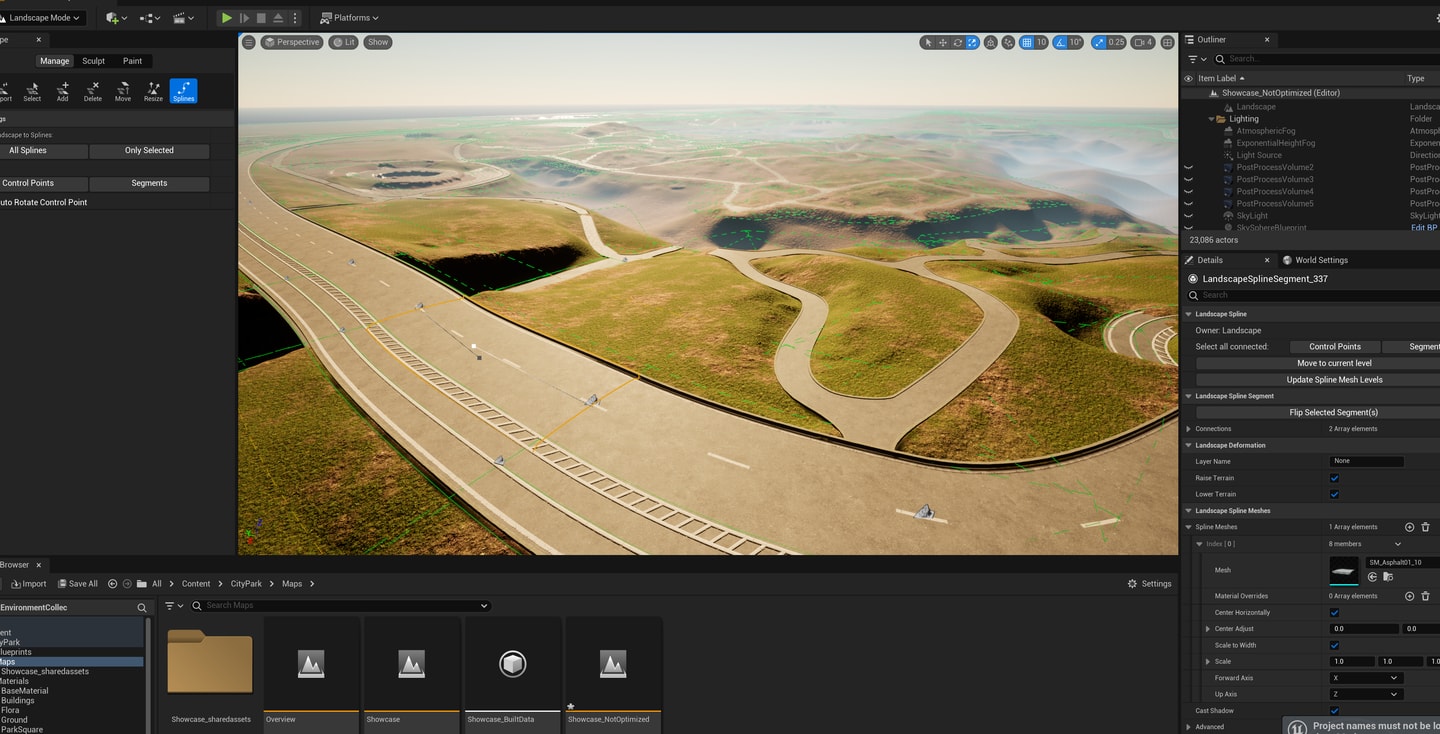
这个项目中包含一个优化和一个未优化的map,目前我发现的区别是道路,在优化的map中道路独立于landscape,是由几个单独的非常宽广的mesh组成。而未优化的map中道路是在landscape中用spline mesh实现的。
之前对这俩概念有模糊印象,是关于选择性加载场景、性能优化的,看过好几个视频了。今天来具体说说。
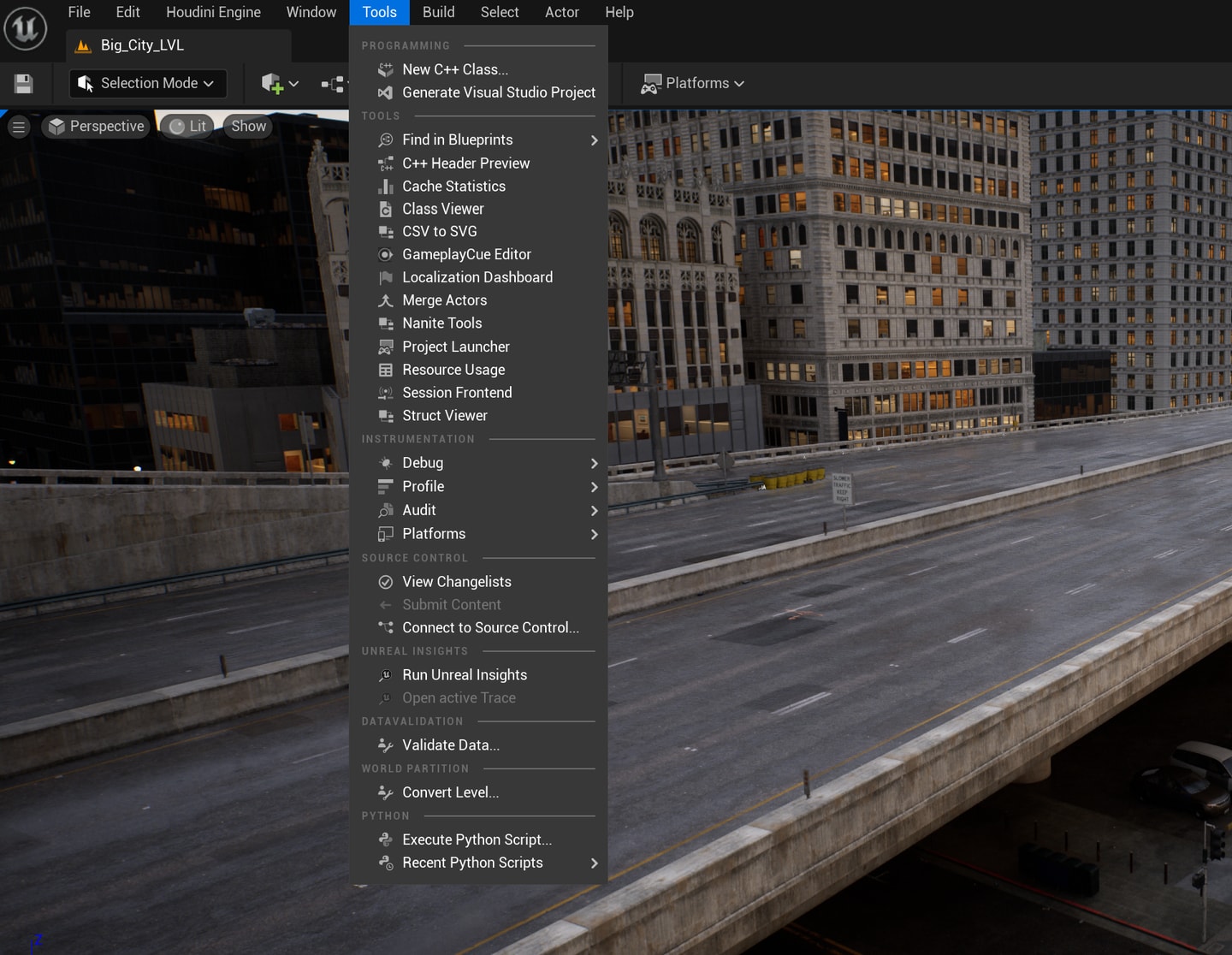
要使用data layer必须开启world partition,而要使用world partition最好是通过初始默认的open world创建,也可以通过convert level实现。
Update your browser to view this website correctly. Update my browser now